Molecular Dynamics simulations of proteins
The simulation is running now (or finished) and we can start analysing
the results. Let us first see which kind of files have been written by
the simulation (mdrun):
ls -lrt
We see the following files:
- traj.xtc - the trajectory to be used for analyses
- traj.trr - the trajectory to be used for a restart in case of a crash
- ener.edr - energies
- md.log - a LOG file of mdrun
- md.gro - the final coordinates of the simulation
The first analysis step during or after a simulation is usually a
visual inspection of the trajectory. For this we will use the gromacs
trajectory viewer ngmx. Other possibilities would be VMD , Pymol, or gOpenmol.
ngmx -s md.tpr -f traj.xtc
Select a group of your interest ("system" might be good for a start),
and then, under "Display", click "Animate". Now a animation player
button appears near the bottom of the screen, which can be used to
view the trajectory. If you wish to filter different simulated
components, choose a different group under "Display" and "Filter".
We can see that the protein and its surroundings undergo thermal
fluctuations, but overall, the protein structure is rather stable, as
would be expected on such timescales.
A more versatile visualisation is provided by pymol. First, we have to extract
the protein coordinates and write to PDB format:
trjconv -s md.tpr -f traj.xtc -o traj.pdb -dt 1.
Now, select group 1 (Protein). And view with pymol:
/usr/global/whatif/pymol/pymol traj.pdb
On the pymol prompt, type:
dss
followed byshow cartoon
Play the animation by pressing the play button.
For a more quantitative analysis
on the protein fluctuations, we can view how fast and how far the
protein deviates from the starting (experimental) structure:
g_rms -s md.tpr -f traj.xtc
When prompted for groups to be analysed, type "1 1 1". g_rms has
written a file called "rmsd.xvg", which can be viewed with:
xmgrace rmsd.xvg
We see the Root Mean Square Deviation (rmsd) from the starting
structure, averaged over all protein atoms, as a function of time. The
deviation of 0.1 nm is within the expected range for a protein like
the B1 domain at a temperature of 300K at such timescales. If we now
wish to see if the fluctuations are equally distributed over the
protein, or if some residues are more flexible than others, we can
type:
g_rmsf -s md.tpr -f traj.xtc -oq
Select group "3" (C-alpha). The result can be viewed with:
xmgrace rmsf.xvg
We can see that mainly two regions in the protein show a large
flexibility: around residue 11 and residue 48. To see where these
residues are located in the protein, type:
rasmol bfac.pdb
Under "Colours", select "Temperature". The protein backbone is now
shown with the flexibility encoded in the colour. The red (orange,
green) regions are relatively flexible and the blue regions are
relatively rigid. It can be seen that the alpha-helix and beta-sheet
are relatively stable, whereas the loops are more flexible.
Repeat the same rasmol command for the x-ray structure (1PGB.pdb).
Question: How do the flexibilities in the simulation compare to the temperature factors in the crystallographic structure?
(note that the correspondence cannot be expected to be 100%, as the protein flexibility in different in the crystal than in solution (as in the simulation). Additionally, not only flexibility is encoded in the crystallographic B-factor, but also experimental error or model inaccuracy)
The simulation not only yields information on the structural
properties of the simulation, but also on the energetics. With the
g_energy the energies written by mdrun can be analysed:
g_energy -f ener.edr
Select "Potential" and end your selection by pressing enter twice, View the result with:
xmgrace energy.xvg
As can be seen, the total potential energy initially rises rapidly after
which it relaxes again.
Question: can you think of an explanation for
this behaviour?
Please repeat the energy analysis for a number of different energy
terms to obtain an impression of their behaviour.
We continue with a number of more specific analysis, the first of
which is an analysis of the secondary structure (alpha-helix,
beta-sheet) of the protein during the simulation.
First, we need to tell gromacs where the DSSP program for secondary structure
calculations can be found:
export DSSP=/usr/global/whatif/dssp/dssp
(or, if you get a message "export: Command not found.", you're perhaps using a
(t)csh in which case the command should be:)
setenv DSSP /usr/global/whatif/dssp/dssp
Now, perform the actual analysis with:
do_dssp -s md.tpr -f traj.xtc
select group "1" (protein), and convert the output to PostScript with:
xpm2ps -f ss.xpm
and view the result with:
gv plot.eps
if "gv" is not installed on your computer, try "xpsview", "ghostview"
or "gs". As can be seen, the secondary structure is rather stable
during the simulation, which is an important validation check of the
simulation procedure (and force-field) used. The next thing to analyse
is the change in the overall size (or gyration radius) of the protein:
g_gyrate -s md.tpr -f traj.xtc
(again, select group "1" for the protein)
xmgrace gyrate.xvg
The analysis shows that the gyration radius fluctuates around a stable
value and does not show any significant drift. Another important check
concerns the behaviour of the protein surface:
g_sas -s md.tpr -f traj.xtc
(again, select group "1" for the protein)
xmgrace -nxy area.xvg
We now see three curves together: black for the hydrophobic accessible
surface, red for the hydrophilic accessible surface, and green for the
total accessible surface.
Question: Is the total
(solvent-accessible) surface constant? Are any hydrophobic groups
exposed during the simulation?
OPTIONAL
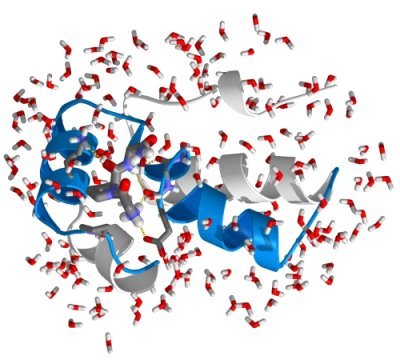
You've probably noticed that in the simulation about only ten percent of the
system that was simulated consisted of protein, the rest was water. As we are
mainly interested in the protein's motions and not so much in the surrounding
water, one could ask if we couldn't forget about the water and rather simulate
the protein. That way, we could reach ten times longer simulations with the
same computational effort!
Question: Why do you think that it is
important to include explicit solvent in the simulation of a protein?
To check if your assumption is correct, repeat the simulation of protein G,
this time without solvent (to observe the effect more clearly, increase the
length of the simulation by changing "nsteps" in the file "md.mdp" by e.g. a
factor of ten).
Question: What are the main differences to the
protein's structure and dynamics as compared to the solvent simulation?
(Hint: use programs like g_rms and g_gyrate to analyse both simulations).